Yang Miao
Researcher in Computer Vision and Robotics at INSAIT
Home
Publications
Selected Projects
CV
Links
Contact
Selected Projects
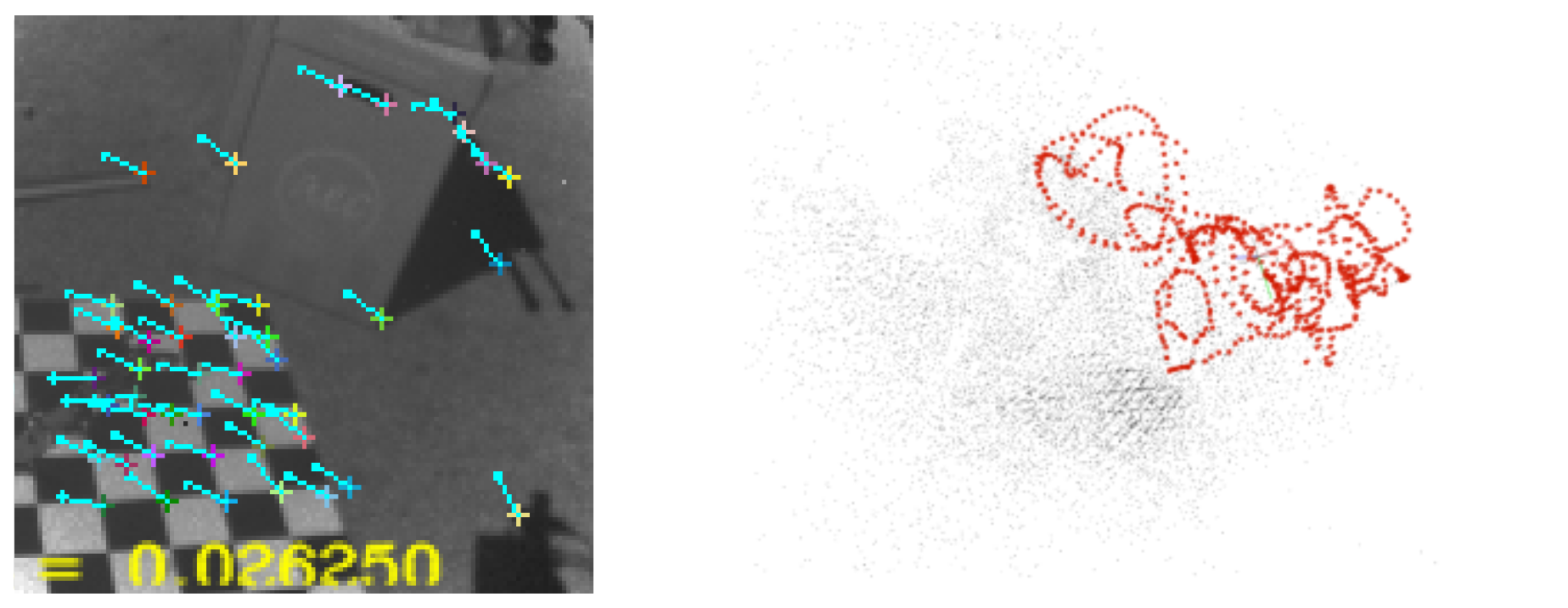
Visual Odometry with New Unprecedented Event Camera
1. Developed feature tracking algorithms for new event camera with events with absolute intensity value.
2. Our method outperform existing method (KLT).
3. Our method grants Oculi sensor (low resolution) feature tracking accuracy comparable to Realsense(high resolution).
Supervisors: Nico Messikommer, Dr. Daniel Gehrig, Prof. Dr. Davide Scaramuzza
[link]